
统一的软硬件架构



智能机器人本体架构包括


*采用云、边、端计算单元一起构成的一个分布式协同计算系统
*支持各种人工智能包括机器人定位导航、图像识别、运动控制等,以及各种传感器数据预处理、网络通信服务等功能。


* 视觉模组、激光雷达、IMU和超声等融合感知。
* 更全面、更准确的感知机器人运行的现实物理世界。



* 使用先进PonCAN光通信、CANFD和以太网等多种通信技术。
* 支持各模块系统之间的高速实时互联和数据交换。


*基于路径规划、运动控制、动态平衡等算法。
*控制机器人移动导航、避障、关节运动及身体的拟人化动作。

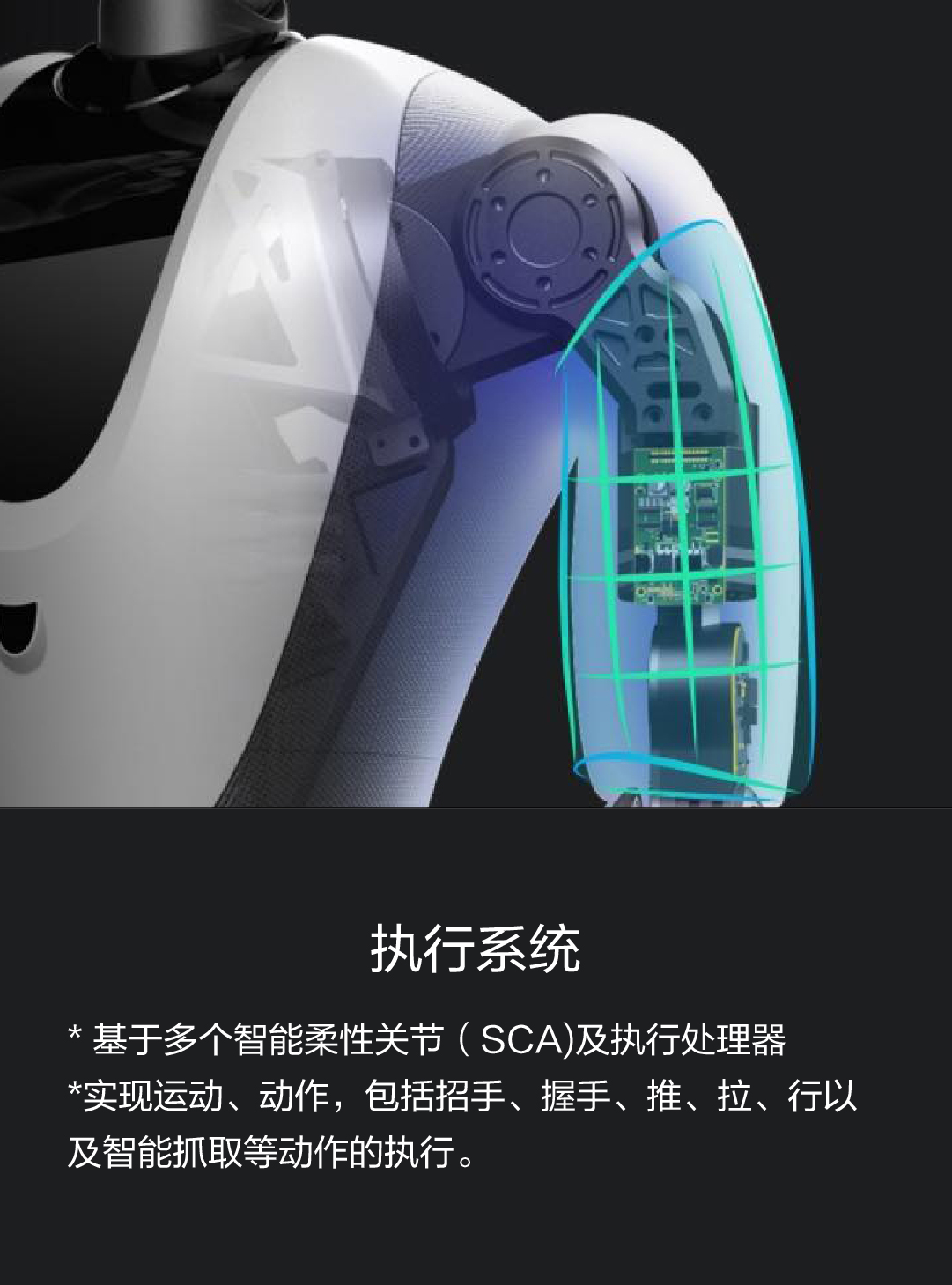
* 基于多个智能柔性关节(SCA)及执行处理器
*实现运动、动作,包括招手、握手、推、拉、行以及智能抓取等动作的执行。


机器人控制器作为云端⼤脑的代理,汇聚机器⼈的多模态感知信息,通过与
云端大脑的协同,给出云端大脑的决策指令,使得命令及交互控制传输到机
器人各对应的硬件系统,实现云端机器人与环境和人们的多模态智能交互。



扫描微信公众号

