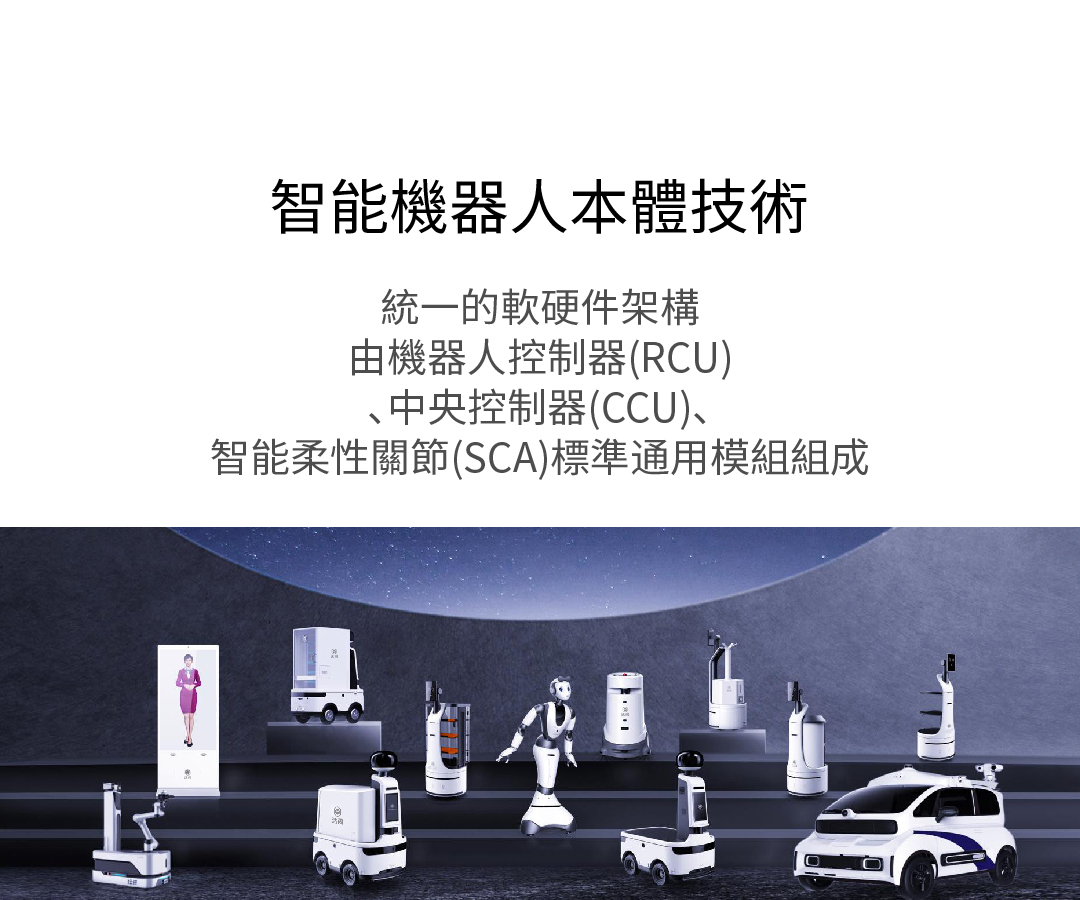
統一的軟硬件架構



智能機器人本體架構包括


*採用雲、邊、端計算單元一起構成的一個分布式協同計算系統
*支持各種人工智能包括機器人定位導航、圖像識別、運動控制等,以及各種傳感器數據預處理、網絡通信服務等功能。


* 視覺模組、激光雷達、IMU和超聲等融合感知。
* 更全面、更準確的感知機器人運行的現實物理世界。




* 使用先進PonCAN光通信、CANFD和以太網等多種通信技術。
* 支持各模塊系統之間的高速實時互聯和數據交換。


*基於路徑規劃、運動控制、動態平衡等算法。
*控制機器人移動導航、避障、關節運動及身體的擬人化動作。

* 基於多個智能柔性關節(SCA)及執行處理器
*實現運動、動作,包括招手、握手、推、拉、行以及智能抓取等動作的執行。


機器人控制器作為雲端⼤腦的代理,匯聚機器⼈的多模態感知信息,通過與
雲端大腦的協同,給出雲端大腦的決策指令,使得命令及交互控制傳輸到機
器人各對應的硬件系統,實現雲端機器人與環境和人們的多模態智能交互。



掃描微信公眾號

